
اخیرا گروهی از محققان مینی پهپادی را طراحی کردهاند که میتواند تودههای شیمیایی معلق در هوا را با کمک فناوری تجسم و کنترل جریان هوا شناسایی نماید. حوادثی نیروگاهی، انفجارها و سایر بلایا همواره پس از وقوع درصدی آلودگی آسیبزا در محدوده هوایی مناطق حادثهدیده پخش میکنند، که تاکنون این آلایندهها قابل ارزیابی و ردیابی نبودهاند؛ اما با کمک این پهپاد که از نظر ابعاد به اندازه کف دست است، میتوان تودههای شیمیایی را در جریان عملیات جستجو و نجات یا ماموریتها، شناسایی کند و از آسیبهای احتمالی حاصل از این اتفاقات، جلوگیری به عمل آورد.
رباتهایی که به صورت خودکار قادر به شناسایی و ردیابی بوهای خاص هستند، میتوانند طیف گستردهای از کاربردهای ارزشمند داشته باشند. به عنوان مثال، آنها میتوانند به شناسایی منابع مواد شیمیایی مضر معلق در هوا پس از حوادث خطرناک در نیروگاهها، انفجارها یا سایر بلایا یاری رسانند.
با این حال، توسعه رباتهایی که میتوانند بوها را به طور قابل اعتمادی شناسایی و دنبال کنند، تاکنون چالشبرانگیز بوده است. در واقع، این روند معمولاً مستلزم ادغام مؤثر حسگرهای بو با کارایی بالا، الگوریتمهای پیشرفته یادگیری عمیق، پلتفرمهای روباتیک قابلاعتماد و برنامهریزان حرکتی است.
محققان دانشگاه اوزاکا، شرکت سافت بانک و موسسه فناوری توکیو، اخیرا پهپاد کوچکی ساختهاند که میتواند برای ردیابی تودههای شیمیایی درطول عملیات جستجو و نجات یا ماموریتهایی با هدف حفاظت از محیط زیست مورداستفاده قرار گیرد. این پهپاد که در مقاله منتشرشده در IEEE Transactions on Instrumentation and Measurement ارائه شده، براساس فناوری تجسم و کنترل جریان هوا به نام سرعت سنجش تصویری ذرات ساخته شده است.
Shunsuke Shigaki، یکی از محققانی که این مطالعه را انجام داده است، به TechXplore گفت: «تحقیق درمورد محلیسازی منبع بوی سهبعدی با استفاده از پهپاد هنوز درمرحله توسعه است. ما در مطالعات قبلی خود، یک یا دو حسگر بو را بر روی یک پهپاد نصب کردیم که بهطور گسترده در ارتفاع و جهت باد متقابل حرکت میکردند، تا منبع بو را شناسایی کنند. ما متوجه شدیم که این روش بسیار ناکارآمد است و باتوجه به زمان کوتاه پرواز پهپاد، لازم بود به طور قابل توجهی عملکرد ردیابی بوی سهبعدی بهبود یابد.»
پهپاد به اندازه کف دست توسط شیگاکی و همکارانش براساس سرعتسنجی تصویر ذرات ساخته شده و یک تکنیک نوری برای اندازهگیری میدان سرعت کل یک منطقه در جریان هوا بهطور همزمان است. محققان بهطور خاص از این تکنیک برای شناسایی جهت ورود مواد شیمیایی استفاده کردند.
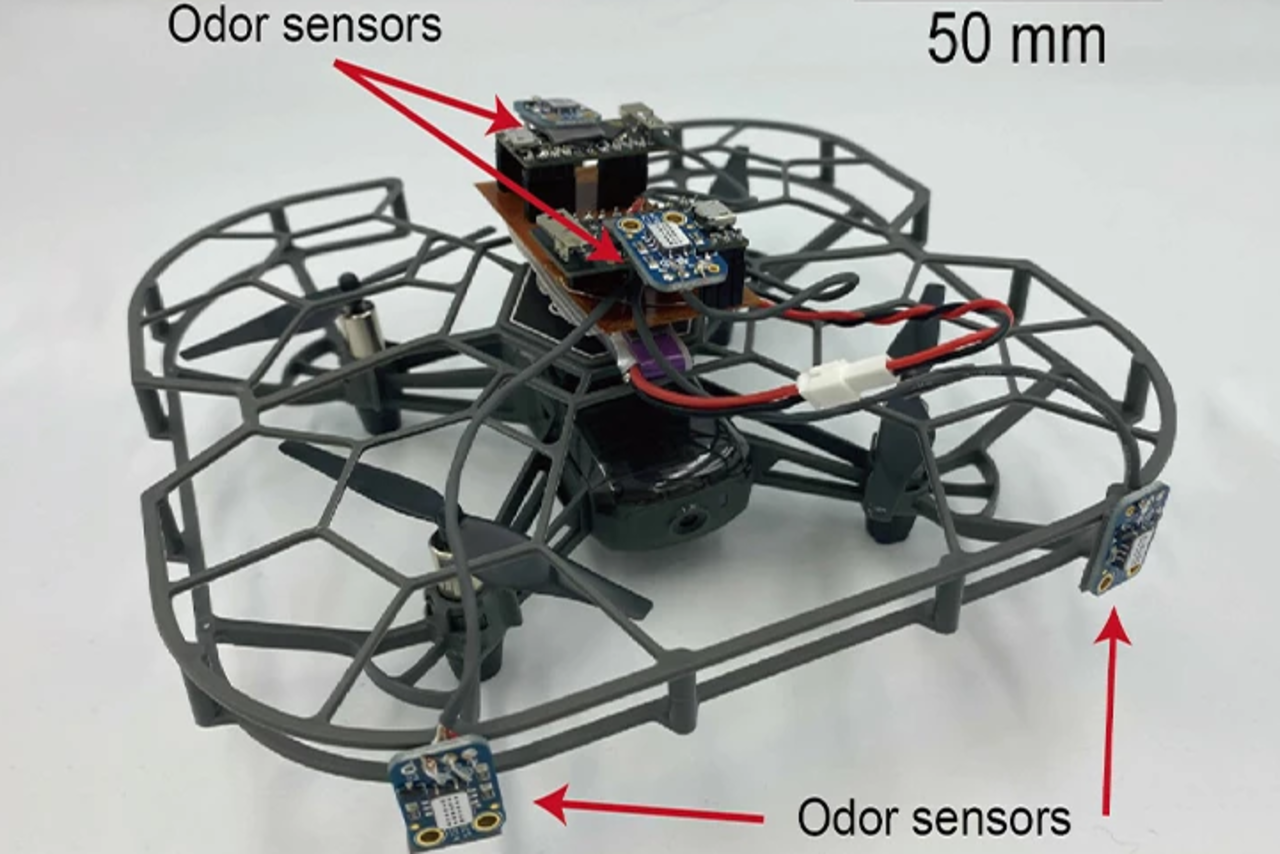
این تیم برای نظارت بر مواد شیمیایی موجود در هوا به صورت سهبعدی، حسگرهای بو را در سطوح بالا و جلوی پهپاد ادغام کردند. برای تطبیق با این آرایش حسگر منحصربهفرد، آنها الگوریتمهای ریختهگری سهبعدی را با الهام از مکانیسمهای بیولوژیکی توسعه دادند، که از طریق آن پروانههای پرنده میتوانند تودههای شیمیایی را ردیابی کنند.
شیگاکی گفت: «نقطهقوت گروه تحقیقاتی ما این است که در فناوری تجسم جریان هوا خوب هستیم. ما با تمرکز بر تغییرات جریان هوای تولیدشده توسط یک پهپاد، متوجه شدیم که پهپاد بسته به ارتفاع منبع بو، بو را متفاوت دریافت میکند. بنابراین، یک آرایش حسگر بو و یک الگوریتم طراحی کردیم که به طور مداوم میتواند بو را بدون در نظر گرفتن جهت و اینکه از کجا آمده ردیابی کند.»
محققان پهپاد ردیابی توده شیمیایی پیشنهادی خود را در مجموعهای از آزمایشهای تجسم و محلیسازی جریان هوا ارزیابی کردند. آنها به طرز قابلتوجهی دریافتند، الگوریتمی که توسعه دادهاند عملکرد بهتری از الگوریتمهای معمولی برای ردیابی تودههای شیمیایی دارد و بهطور مؤثری بوها را حتی در سناریوهایی که جهت باد به صورت مداوم تغییر میکند، ردیابی نماید.
در آینده، پهپاد به اندازه کف دست و الگوریتم ردیابی توده شیمیایی که توسط شیگاکی و همکارانش ساخته شده است، میتواند راه را برای ایجاد سیستمهای رباتیک با عملکرد بهتر بهمنظور تشخیص بوها و شناسایی منابع آنها هموار نماید. در مطالعات بعدی، محققان همچنین قصد دارند طراحی خود را بهبود بخشند، تا اطمینان حاصل کنند که سیستم ردیابی توده شیمیایی نیز در محیطهای نامشخص، درهم و برهم و نقشهبرداری نشده بهخوبی عمل میکند.
شیگاکی توضیح داد: «انتشار بو بسیار پیچیده است، اما ترکیب پیشنهادی ما از آرایش حسگر و الگوریتم، تمرکز بر منبع بو را بسیار کارآمد میسازد. ما امیدواریم که پیشنهاد ما تکنیکی اساسی برای بویایی پهپاد باشد و اکنون میخواهیم با توسعه سیستمی که میتواند مواد شیمیایی خطرناک یا مواد منفجره حاصل از چندین منبع بو را با استفاده از پهپادهای متعدد به سرعت جستجو کند، به ایمنی و امنیت کمک کنیم.»
شیگاکی گفت: «نقطهقوت گروه تحقیقاتی ما این است که ما در فناوری تجسم جریان هوا خوب هستیم. در واقع، ما با تمرکز بر تغییرات جریان هوای تولیدشده توسط یک پهپاد، متوجه شدیم که پهپاد بسته به ارتفاع منبع بو، بو را متفاوت دریافت میکند. بنابراین، یک آرایش حسگر بو و الگوریتمی طراحی کردیم که میتواند به طور مداوم بو را بدون در نظر گرفتن جهت ردیابی کند.»








